
Director: Professor Robert E. Skelton
Department of Mechanical and Aerospace
Engineering
University of California, San Diego
La Jolla, CA 92093-0411
Phone: (858) 822-1054
FAX: (858) 822-3107
E-Mail: bobskelton@ucsd.edu
Laboratory: EBU I 2114
Hardware | Other | Posters | Lab Members
The artist Kenneth Snelson built the first tensegrity structure. Buckminster Fuller coined the word tensegrity from two words, tension and integrity. Tensegrity structures are built of bars and tendons attached to the ends of the bars. The bars can resist compressive force and the strings cannot. Most bar-string configurations which one might conceive are not in equilibrium, and if actually constructed will collapse to a different shape. Only bar-string configurations in a stable equilibrium will be called tensegrity structures. If well designed, the application of forces to a tensegrity structure will deform it into a slightly different shape in a way which supports the applied forces. Tensegrity structures are very special cases of trusses, where members are assigned special functions. Some members are always in tension and others are always in compression. We will adopt the words "tendons'' for the tensile members, and "bars'' for compressive members. A tensegrity structure's bars cannot be attached to each other through joints that impart torques. The end of a bar can be attached to strings or ball jointed to other bars.
Class 1. A two stage tensegrity structure whose internal geometry and shape are reconfigurable for deployment and non-symmetric applications.
Class 2. A two stage tensegirity structure whose internal geometry and shape are reconfigurable for deployment and lifting applications. In addition, stiffness modifications can be accomplished via shape change while keeping certain structural constraints constant, such as total height of the boom.
Static Tower with Active Damping
Class 1. A three stage tensegrity structure with piezo-electric force actuators and sensors for active damping of vibrations. This experiment also demonstrates the modes of vibration of a typcial tensegrity structure.
Class 1. A nine stable unit tensegrity structure that is reconfigurable and can be used as a deployable parabolic dish.
Class 1. A "Planar Tensegrity Cross" structure that utilizes shape memory alloys for locomotion via shape change.
Pneumatic Bar Controlled Tensegrity Structure
Class 1. A Tensegrity "Stewart Platform-like" structure where bar lengths are controlled.
Class 1: All compressive
members (bars) in the structure DO NOT touch.
Class 2: Two compressive members (bars) touch at a joint.
Class k: K compressive members (bars) touch at a joint.
Optimization of Tensegrity Structures
Economic Simulation Problem and Economic Sensor Actuator Selection
FSN Controllers for Biological Control
Active Vibrations Control of a Three Stage Tensegrity Structure 2003 (.jpg)
Deployment of a Class 2 Tensegrity Boom 2004 (.jpg)
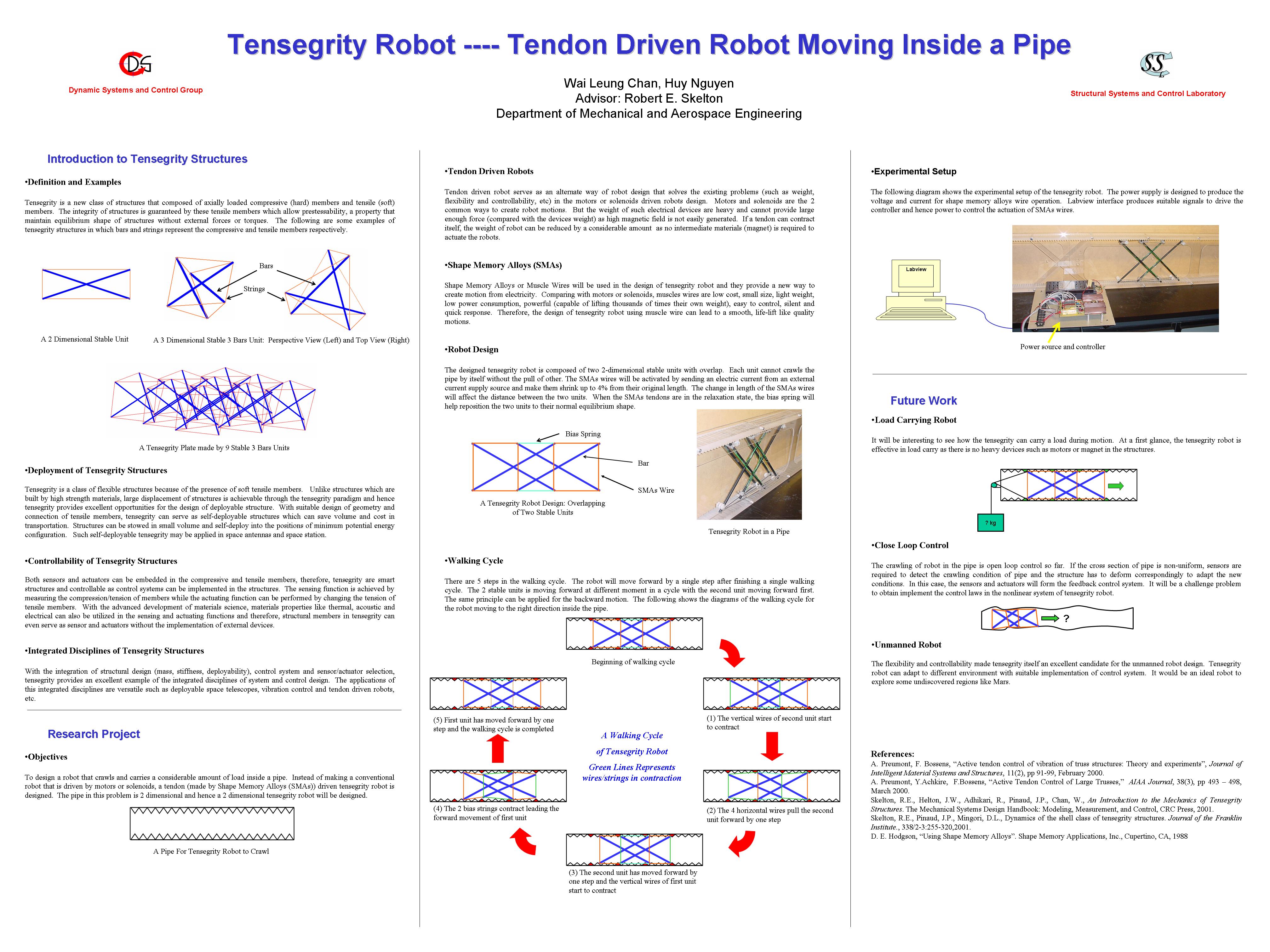
Tensegrity Robot - Tendon Driven Robot Moving Inside a Pipe 2003 (.jpg)
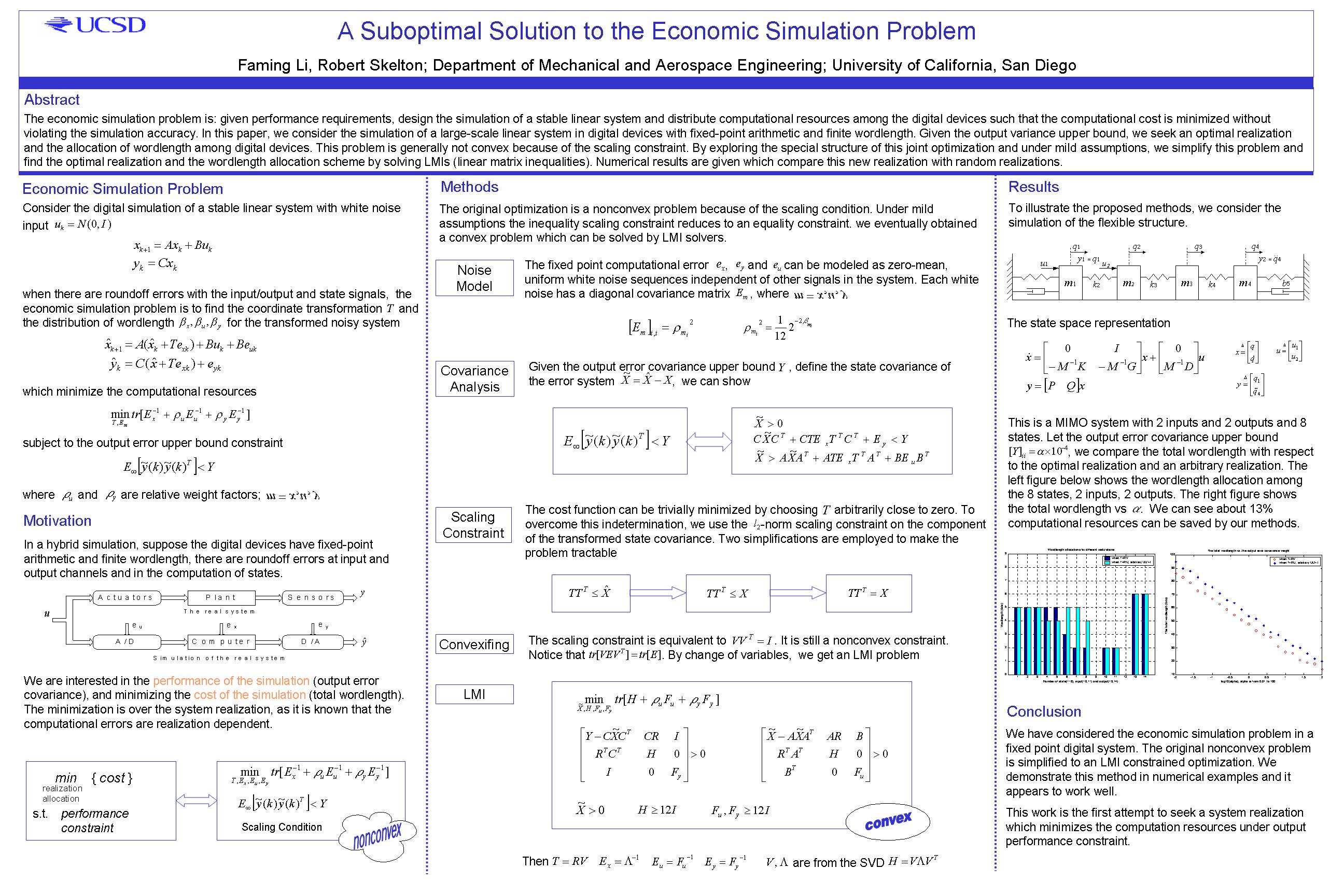
A Suboptimal Solution to the Economic Simulation Problem. 2003 (.jpg)
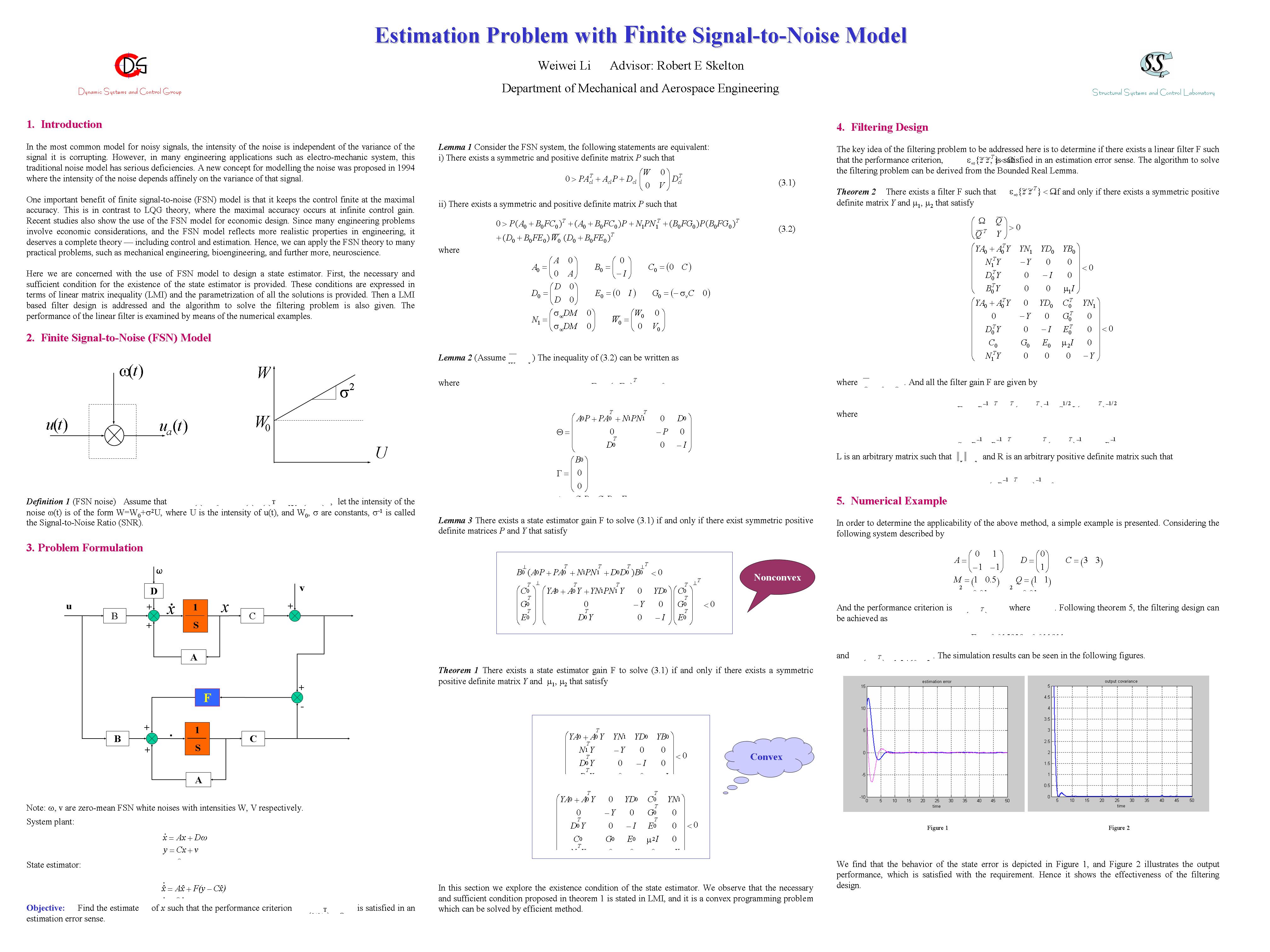
Estimation Problem with Finite Signal-to-Noise Ratio 2003 (.jpg)
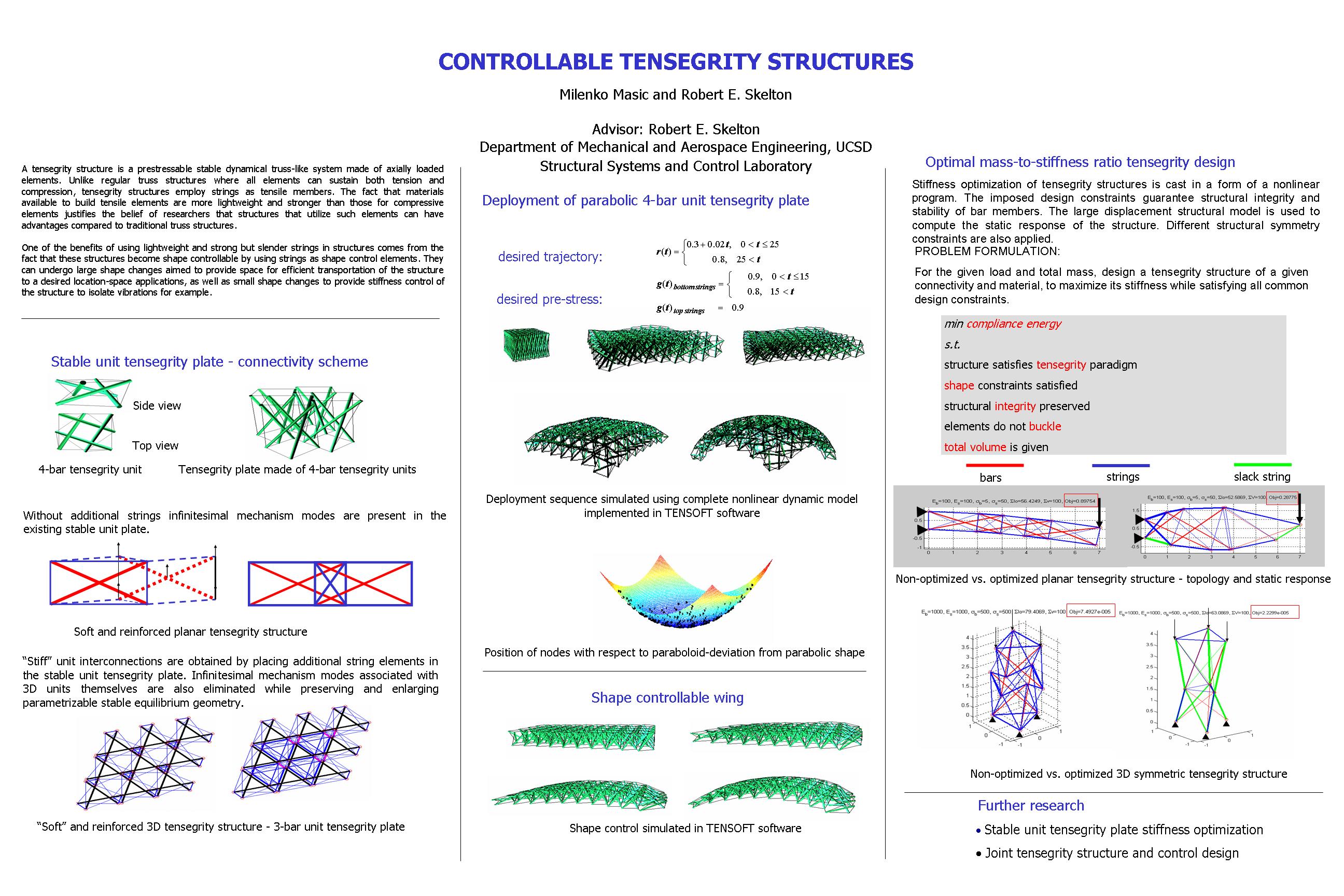
Controllable Tensegrity Structures 2003 (.jpg)
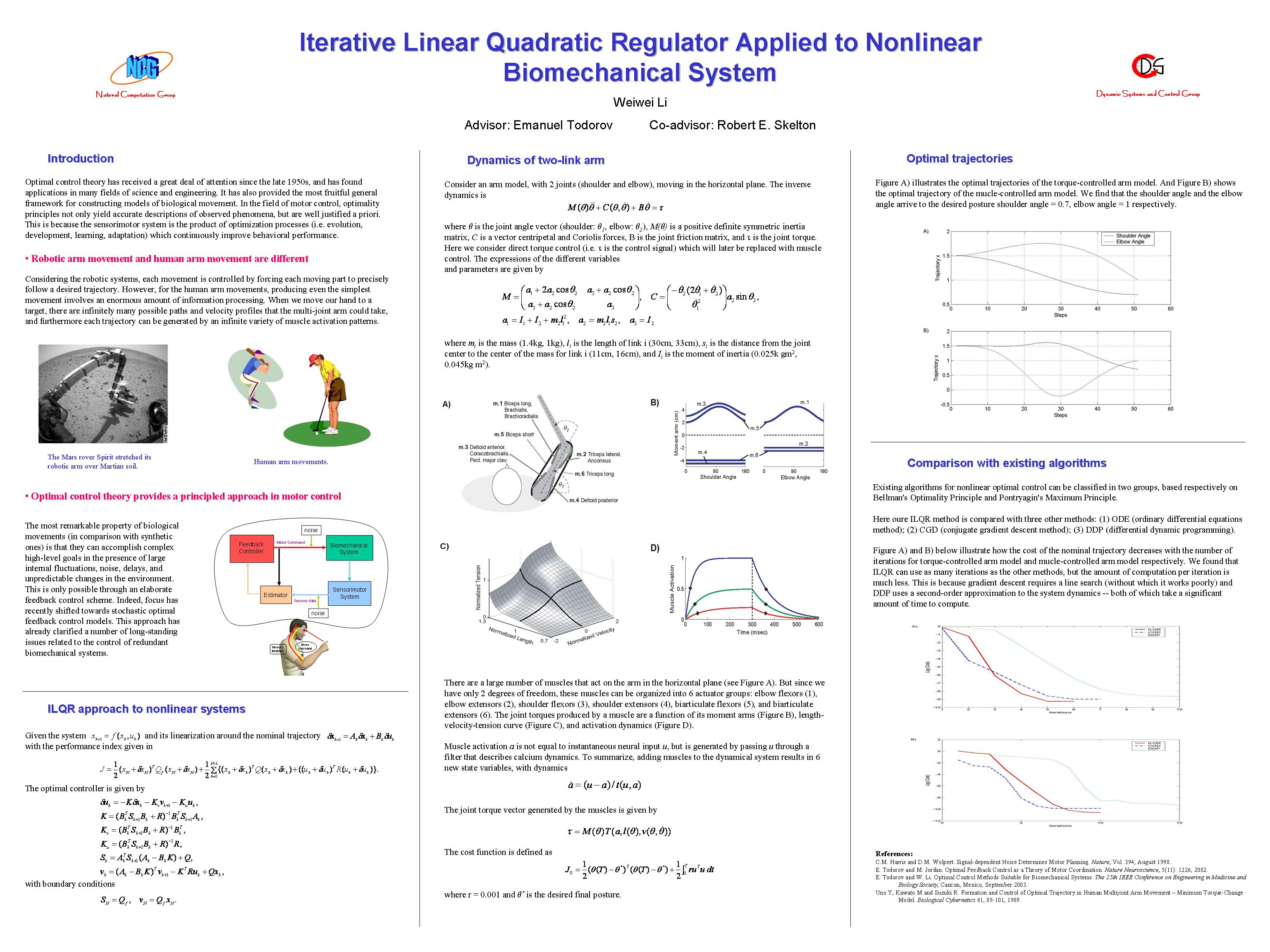
Iterative Linear Quadratic Regulator Applied to a Nonlinear Biomechanical System 2004 (.jpg)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}