Home | Overview | Simulation of Concept | Experimental Hardware | Videos
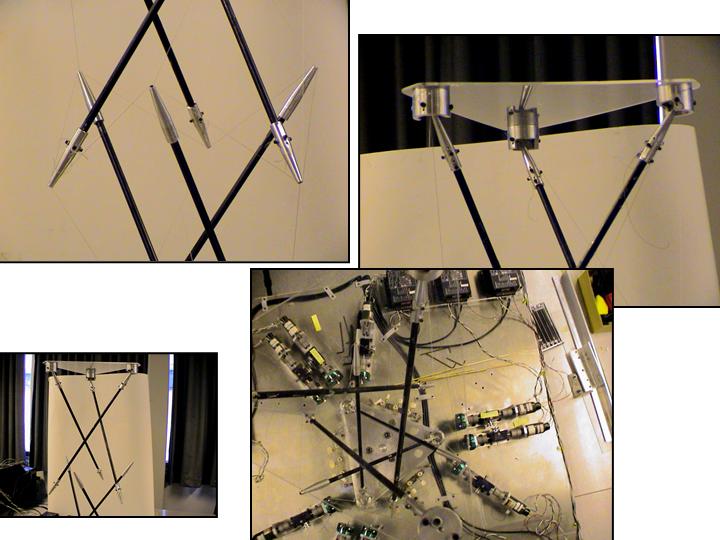
Tensegrity structures consist of tendons (in tension) and bars (in compression). Tendons are strong, light, and foldable, so tensegrity structures have the potential to be light but strong and deployable. Pulleys, NiTi wire, or other actuators to selectively tighten some strings on a tensegrity structure can be used to control its shape. This experiement shows the problem of asymmetric reconfiguration of tensegrity structures and poses one method of finding the open loop control law for tendon lengths to accomplish the desired geometric reconfiguration. In addition, a practical hardware experiment displays the readiness and feasibility of the method to accomplish shape control of the structure.
An interesting application of this tensegrity is the controlled deployment of the structure from a near zero initial height to a greater height. Moving along the equilibrium manifold (shown in Figure 1) consists of moving along symmetrical prestressable configurations. We use an open loop control strategy based upon slowly moving from one stable equilibrium to another. Stability along the deployment path is assured only if this movement is slow enough.
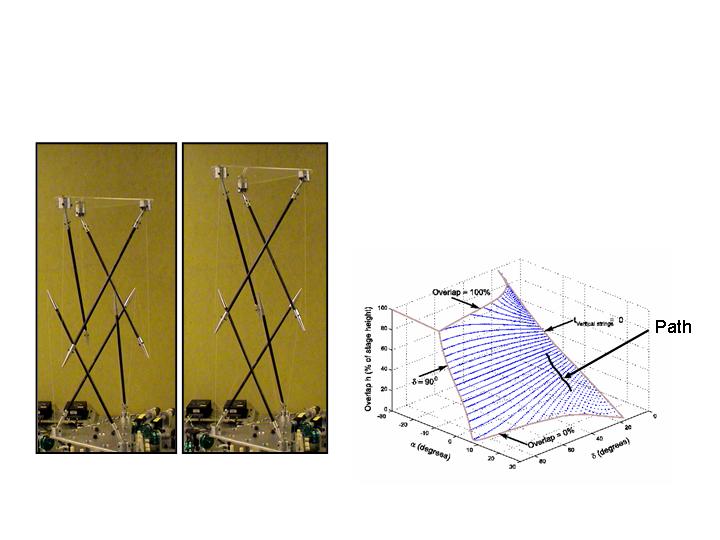 Figure 1 - Deployment Concept with Equilibrium Surface
Figure 1 - Deployment Concept with Equilibrium Surface
Unfortunately, one shortcoming of the symmetrical parameterization for the two stage structure described is that the top and bottom triangles (top and bottom plates) are always parallel to each other and cannot deviate from that condition. In addition the center of mass of both plates is always aligned with the axis of symmetry. This is due to the fact that all bars are assigned the same parameter, therefore making the structure completely symmetric and representable by merely three parameters. If one wishes to modify the attitude or deviation of the top plate’s center of mass away from the axis of symmetry, one has to abandon the symmetrical parameterization and investigate the possibilities in the asymmetric space. The asymmetrical parameterization involves using the maximum number of parameters to describe the structure, as opposed to the minimal set previously. Therefore, six independent parameters will be assigned to each bar member, increasing the parameter space to thirty-six. An investigation into the allowable space for each parameter would result in an equilibrium manifold represented by thirty-six parameters which is not practical. (We assume later that bar length is constant for all bars, reducing to five parameters per bar or thirty parameters total.) Due to the increase in independent parameters, the equilibrium manifold has become immensely large and a search to characterize this space would most likely be fruitless and yield no special insight. It is obvious that the symmetric parameterization is a special case of the asymmetric one.
For further details consult the following publications:
Pinaud, J.P., Masic, M., Skelton, R.E. Path planning for the deployment of tensegrity structures. SPIE’s 10th Annual International Symposium on Smart Structures and Materials, San Diego, CA, March 2003.
Skelton, R.E., Helton, J.W., Adhikari, R., Pinaud, J.P., Chan, W., An Introduction to the Mechanics of Tensegrity Structures. The Mechanical Systems Design Handbook: Modeling, Measurement, and Control, CRC Press, 2001.
Skelton, R.E., Pinaud, J.P., Mingori, D.L., Dynamics of the shell class of tensegrity structures. Journal of the Franklin Institute., 338/2-3:255-320, 2001.