Figure 1 shows a minimum-time maneuver for a reconfigurable planar tensegrity robot. This particular robot consists of two double-link manipulators coupled by a 6-tendon actuation network. Each tendon and its tension is labeled. It is important to recognize that each manipulator tip can follow a user-defined path that is, for the most part, independent of the other path. The path of each tip consists of a smooth curve from an initial point A to a final point E. The time-optimal trajectory along this path consists of maximum acceleration segments AB, CD, that alternate with maximum deceleration segments BC and DE.
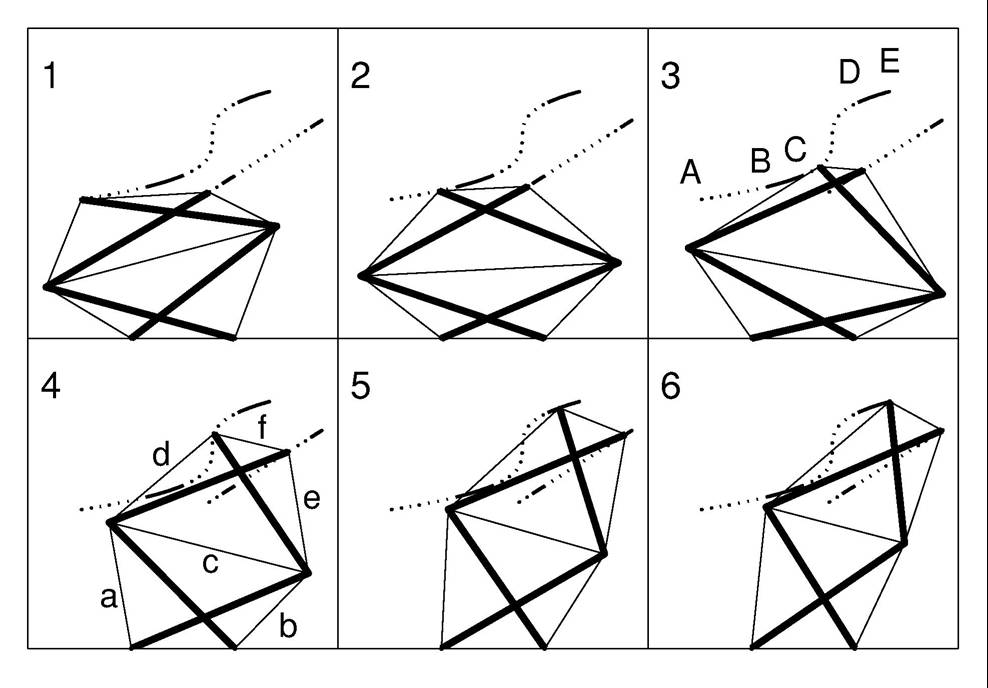 Figure 1 : Minimum-time maneuver along a path.
Figure 1 : Minimum-time maneuver along a path.
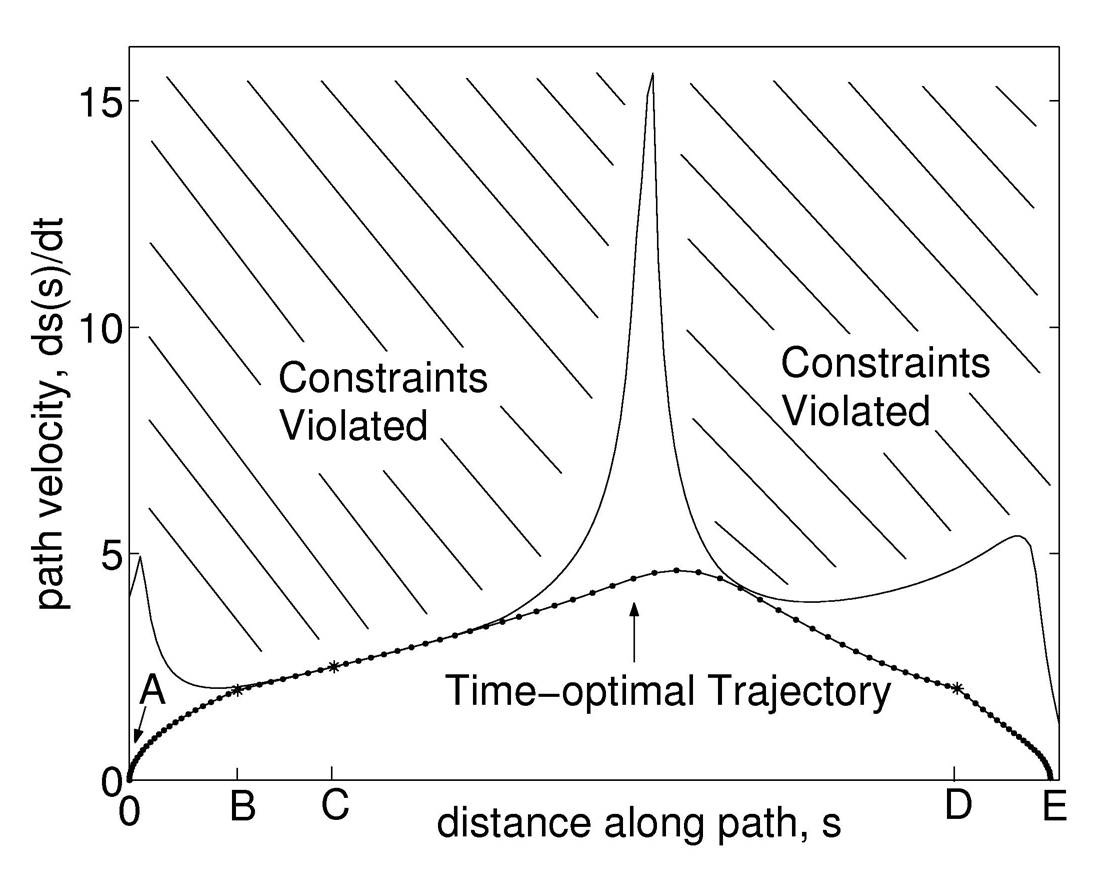 Admissible path velocity and the time-optimal trajectory.
Admissible path velocity and the time-optimal trajectory.
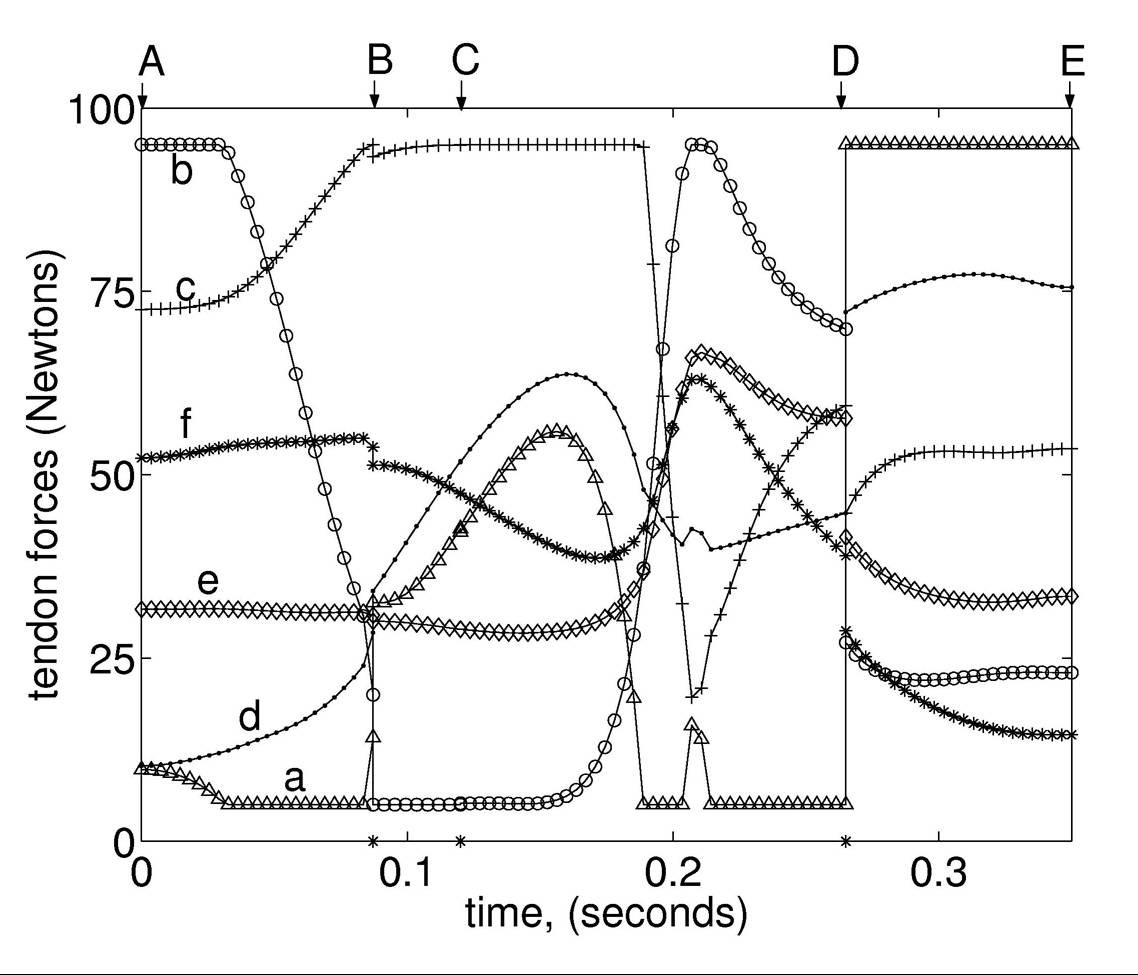 Time-optimal tendon forces (N).
Time-optimal tendon forces (N).
Using an iterative method, the location of the switching points, B, C and D, is chosen in order to minimize acquisition-time subject to the constraint that all tendons remain taut and unbroken. Figure 1 shows that this trajectory is indeed optimal as it maximizes the the path velocity at each point along the path while preventing tendon saturation. Once the optimal path trajectory is computed, the time-optimal tendon force trajectories are computed.
For more details refer to the following publications:
Aldrich, J.B., Skelton, R.E., Kreutz-Delgado, K., “Control Synthesis for a Class of Light and Agile Robotic Tensegrity Structures”, Proceedings of 2003 American Control Conference, Denver, pages 5245-5251.
Aldrich, J.B., Skelton, R.E., “Control/Stucture Optimization Approach for Minimum-time Reconfiguration of Tensegrity Systems”, Smart Structures and Materials: Modeling, Signal Processing and Control, San Diego, CA, Proceedings of SPIE Vol. 5049 (2003), pages 448-459.