Home | Overview | Experimental Hardware | Videos
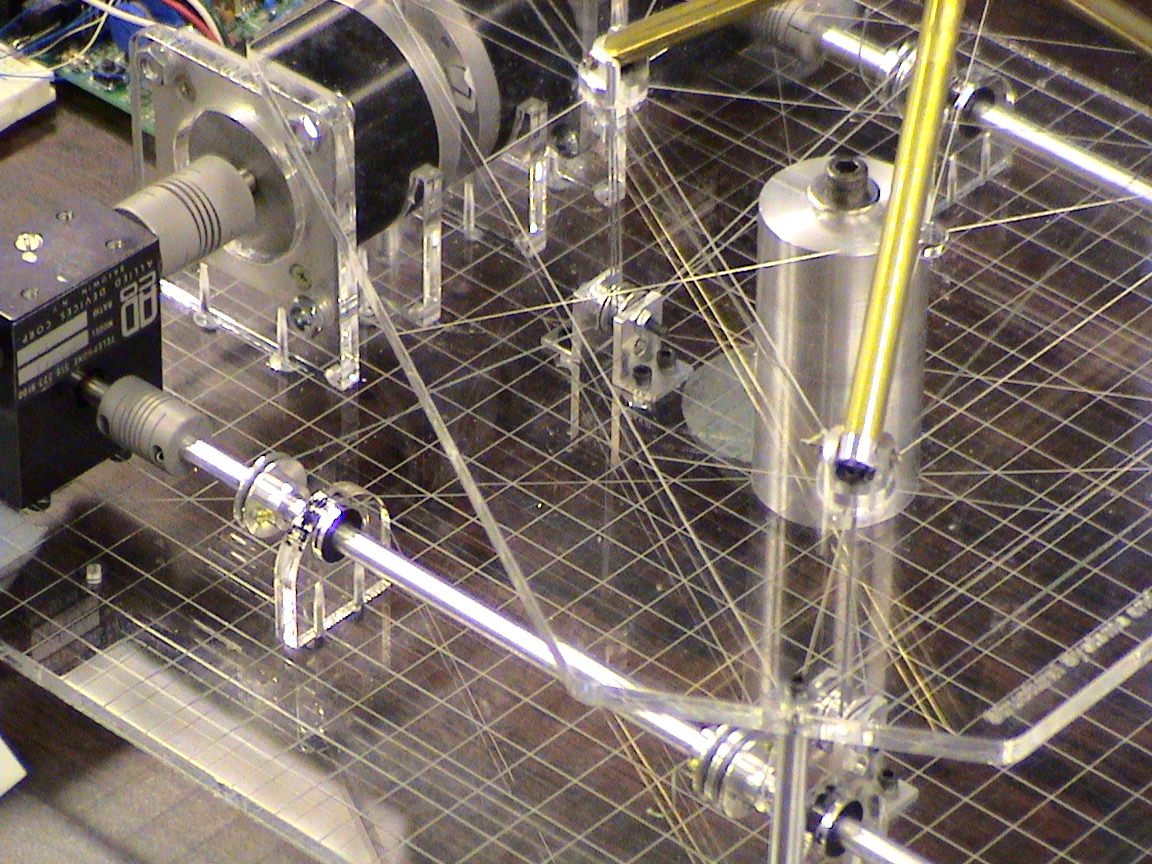
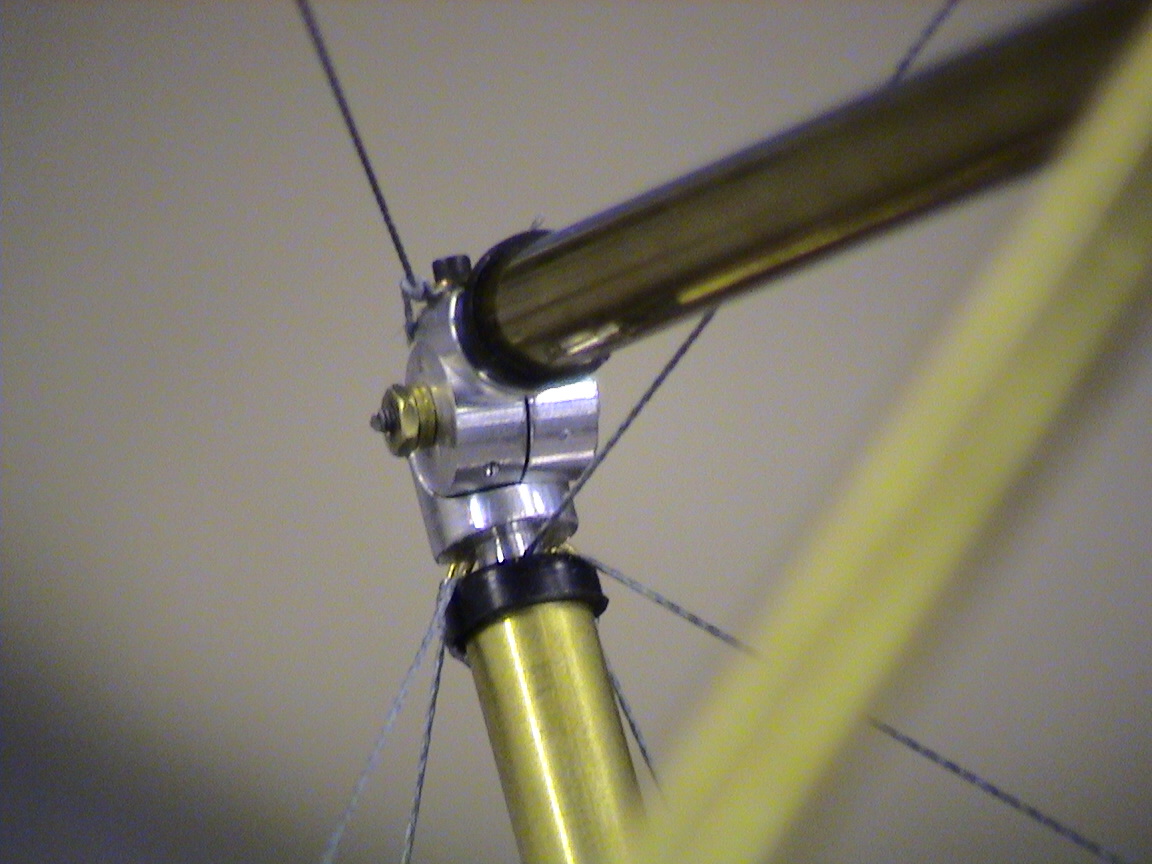
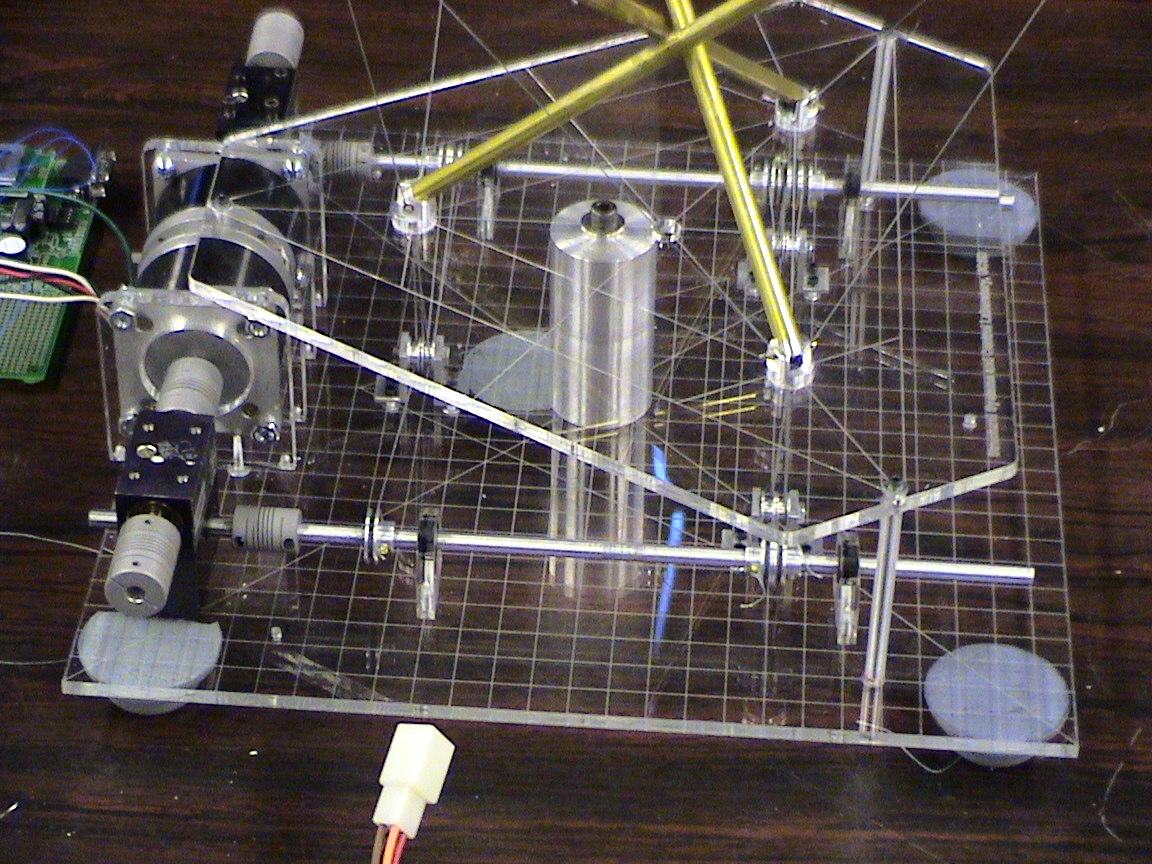
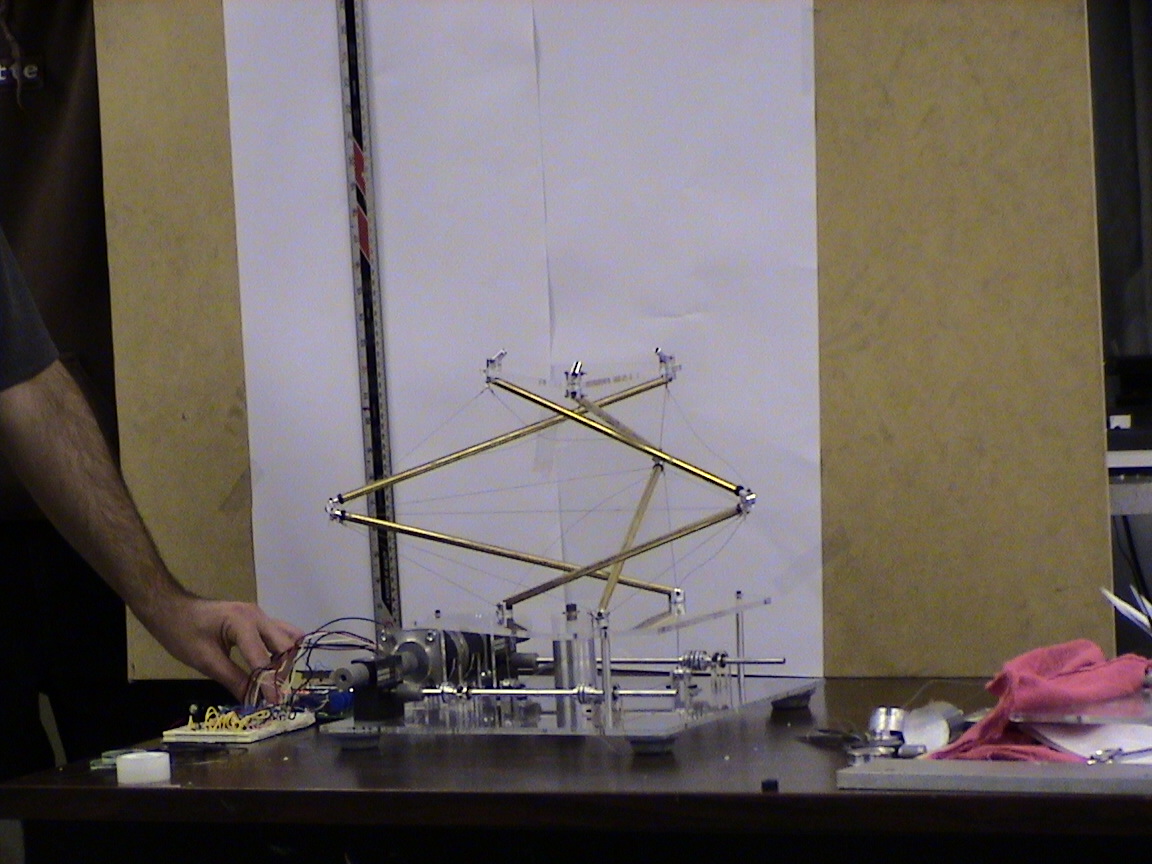
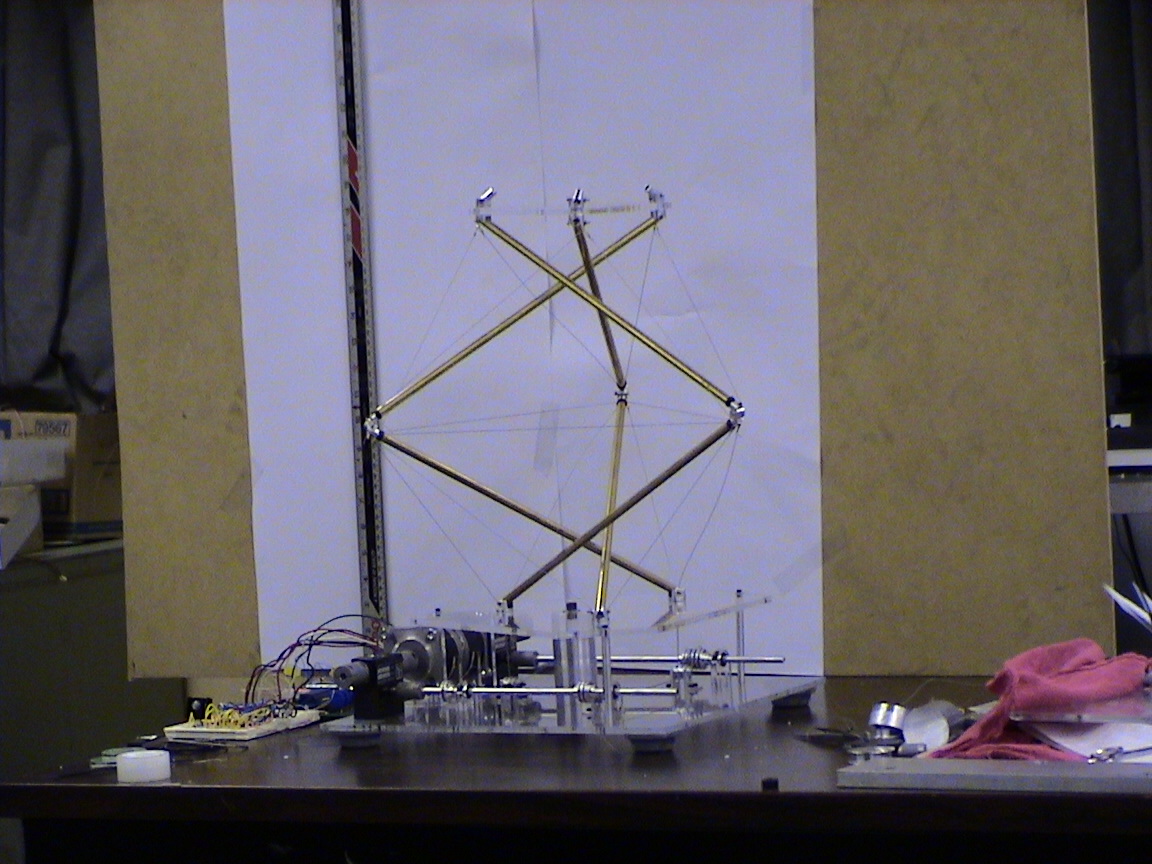
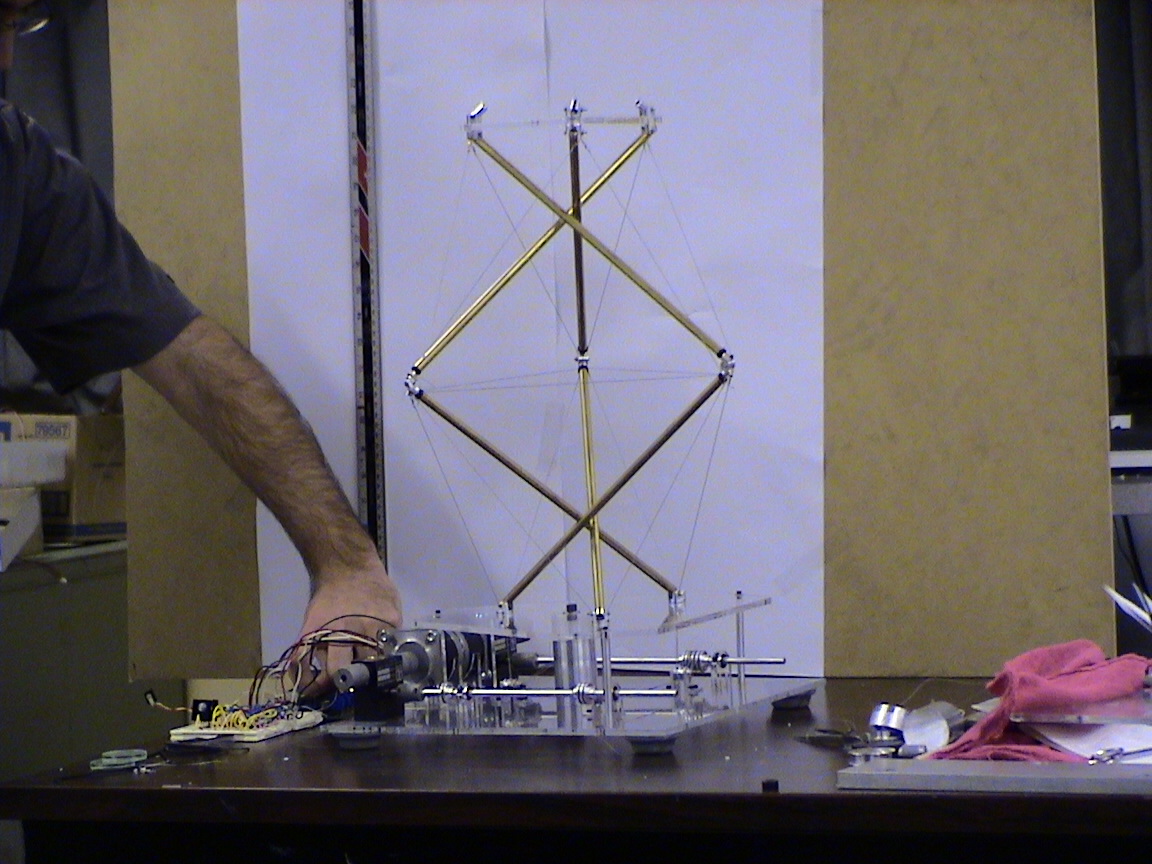
Tensegrity structures are special truss structures composed of bars in compression and cables in tension. Most tensegrity structures under investigation, to date, have been of Class 1, where bars do not touch. In this experiment, however, we demonstrate the hardware implementation of a 2 stage symmetric Class 2 tensegrity structure, where bars do connect to each other at a pivot. The open loop control law for tendon lengths to accomplish the desired geometric reconfiguration are computed analytically. The velocity of the structure’s height is chosen and reconfiguration is accomplished in a quasi-static manner, ignoring dynamic effects. The main goal of this research was to design, build, and test the capabilities of the Class 2 structure for deployment concepts and to further explore the possibilities of multiple stage structures using the same design and components.
For further details consult the following publications:
Masic, M., Skelton, R.E., Open Loop Control of Class-2 Tensegrity Towers. SPIE’s 11th Annual International Symposium on Smart Structures and Materials, San Diego, CA, March 2004.
Masic, M., Skelton, R.E., Optimization of Class-2 Tensegrity Towers. SPIE’s 11th Annual International Symposium on Smart Structures and Materials, San Diego, CA, March 2004.