 Overview
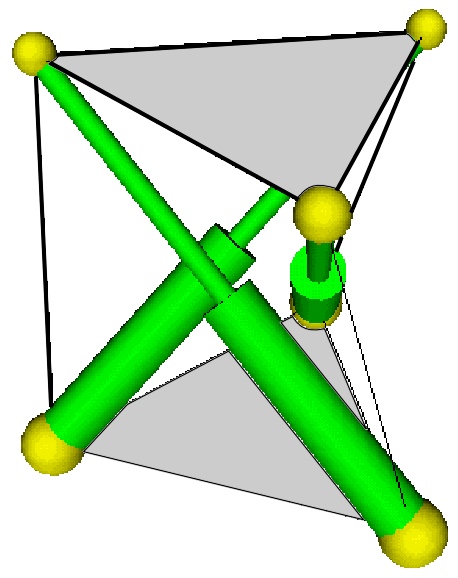
OverviewThe 3 member tensegrity is the most basic 3 dimensional tensegrity structure. The purpose of this experiment is to construct and control a 3 member tensegrity mechanism which is capable of changing its own geometry by using extendable cylinders as the compressive members.
We would like to expore this control problem in the hopes of gaining insight in the ability to control larger tensegrity structures in this class
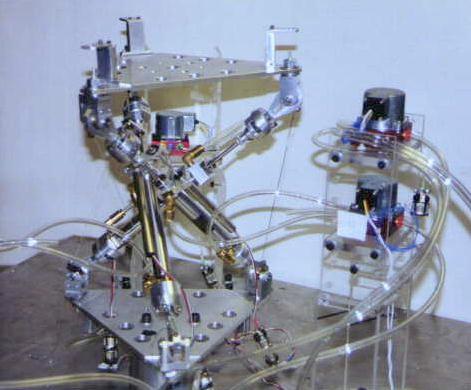
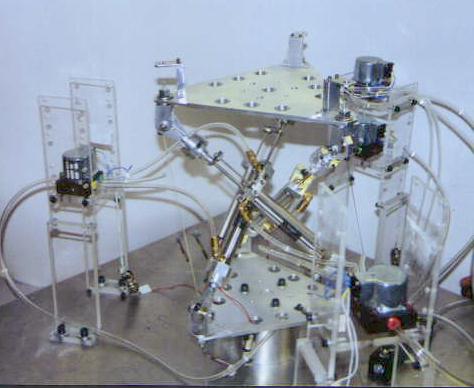
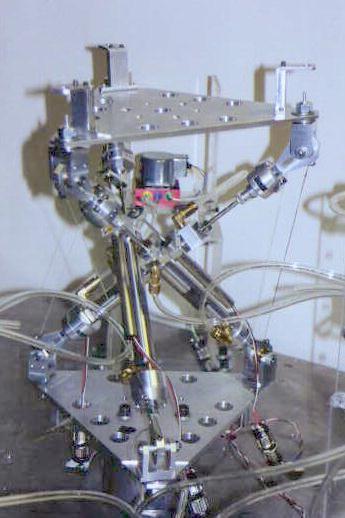
We have constructed a device similar to the figure shown above using Airpel pnuematic cylinders as the compressive members. We have also replaced the top strings of the tensegrity with a rigid aluminium plate and fixed the bottom of each bar to the ground with a 2 DOF join.
The control objective of this experiment is to position the center of the top plate at a specific point in the mechanism's workspace using the variable length of each cylinder as an input. The analysis of this problem includes the derivation of the static, kinematic and dynamic equations for this mechanism. We would like to determine the feasability of the control problem using both linear and nonlinear analysis.